Free • ROS2 Compatible
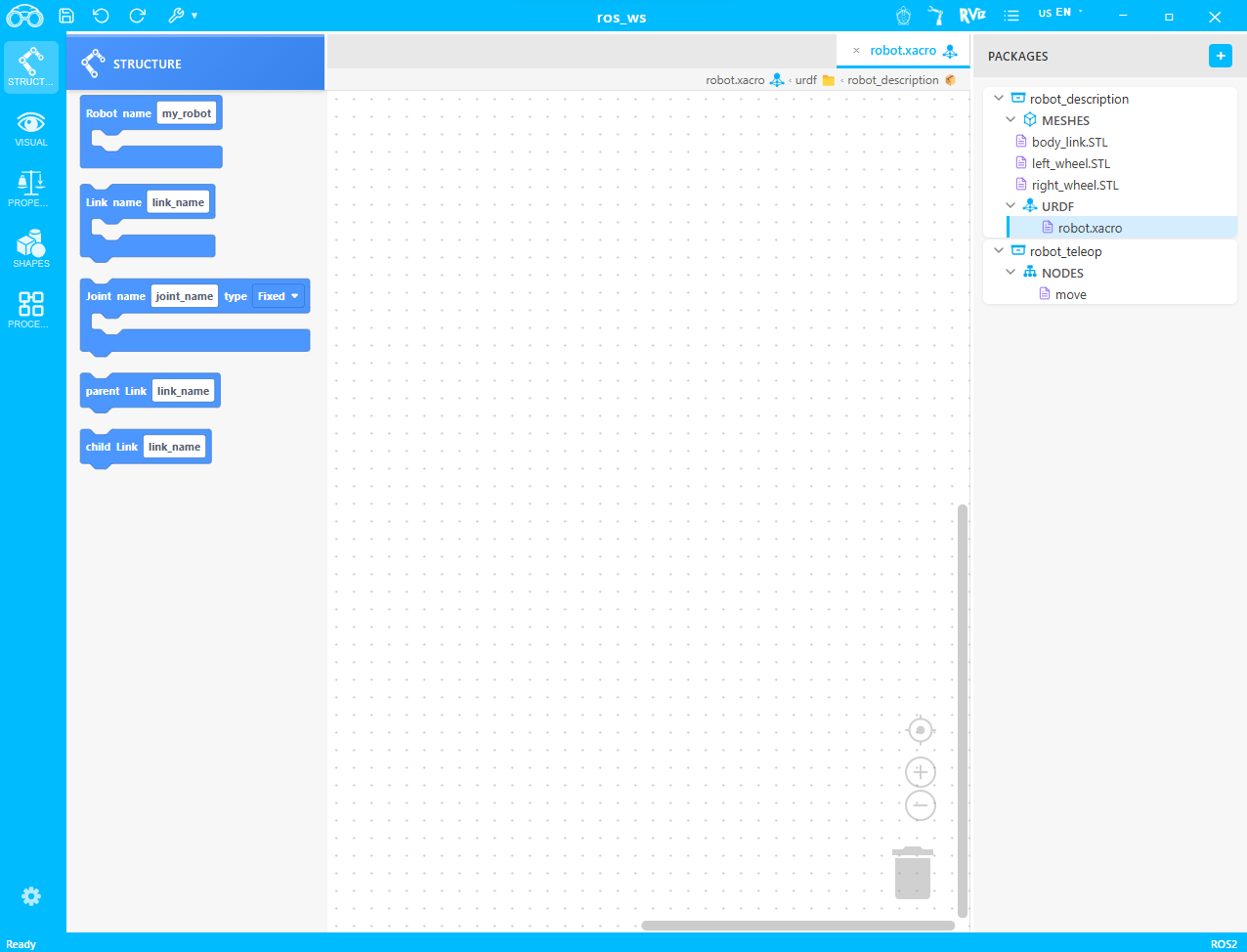
Build Robots Visually
A powerful visual block-based IDE for ROS2 development. Create robot structures, define URDF models, and program nodes with intuitive drag-and-drop blocks.
100%
Visual
ROS2
Compatible
Free
To Use